Управление вектором тяги. Как ведет себя седан Lexus GS F на испанских прямиках и на гоночном треке Харама Управляемый вектор тяги митсубиси
Для управления вектором тяги в РДТТ крепить весь двигатель в подвесе нецелесообразно (за исключением, пожалуй, верньерных двигателей), поэтому в распоряжении проектировщиков
Рис. 117. Сопловые тримеры
остаются следующие решения: установка в сопле механических регулирующих поверхностей, отклоняющих газовую струю, поворот сопла или его части, вторичная инжекция и использование дополнительных управляющих сопел (подобно тому, как это делается в ЖРД).
К механическим регулирующим поверхностям относятся, кроме обсуждавшихся выше газовых рулей и дефлекторов, вдвижные и поворотные триммеры, показанные на рис. 117. Воздействие отклоняющих поверхностей на газовую струю можно приближенно рассчитать по теории сверхзвукового обтекания профиля, но для получения точных значений управляющей силы (составляющей силы тяги, перпендикулярной оси двигателя) в зависимости от величины отклонения необходимы, измерения. В работе сообщается, что сопла с таким управлением газовой струей позволяют с хорошей воспроизво димостью получить максимальные боковые силы, достигающий осевой составляющей тяги. Несмотря на то что улрав ление векотором тяги с помощью подвижных механических поверхностей приводит к потерям тяги вследствие дополнительного сопротивления и требует кропотливых опытно-конструкторских и технологических работ, направленных на обеспе-: чение их прочности и целостности в условиях высоких динамических давлений, температур и тепловых потоков, они успешна применялись в таких ракетах, как «Поларис» и «Бомарк».
Поворотные сопла обеспечивают наиболее эффективное механическое управление газовой струей, поскольку они не вызы вают существенного снижения тяги и конкурентоспособны по, массовым характеристикам. Одним из примеров использований такого технического решения является применявшаяся на первой ступени ракеты «Минитмен» сборка из четырех поворотных сопел с карданным подвесом и шаровым шарниром.
Система позволяла управлять вектором тяги в плоскостях рыскания, тангажа и крена без заметных потерь тяги, причем угол отклонения газовой струи зависел линейно от поворота соплового блока.
Дальнейшее совершенствование методов управления вектором тяги связывают с более современными схемами, позволяющими исключить применение карданного подвеса и подвижных горячих металлических частей, размещаемых в сопле РДТТ. К таким схемам относятся: а) разработанная для РДТТ межорбитальных буксиров система подвески сопла типа «техрол» (см. рис. 148 в гл. 11); б) используемая в двигателе разгонного модуля система управления вектором тяги с соплом на шарнирном подвесе (см. рис. 150 в гл. 11); в) используемая в твердотопливном ускорителе ВКС «Спейс Шаттл» схема крепления сопла на гибкой опоре. Рассмотрим последнюю схему более подробно.
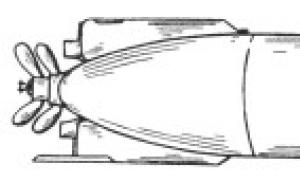
На рис. 118 изображена кормовая сборка ТТУ и показано расположение агрегатов системы управления вектором тяги, а на рис. 119 показано устройство гибкого соединительного узла сопла. Соединительный узел представляет собой оболочку из гибкого эластичного материала с 10 стальными кольцевыми прокладками дугообразного сечения. Первое и последнее армирующие кольца прикреплены к неподвижной части сопла, которая соединена с корпусом двигателя. Исполнительные механизмы поворотного сопла работают от вспомогательного энергоблока . Он состоит из двух отдельных гидронасосных агрегатов, которые передают гидравлическую энергию на рабочие сервоцилиндры, причем один обеспечивает поворот сопла в плоскости скольжения, а другой - в плоскости бокового разворота (рис. 120). Если один из агрегатов отказывает, гидравлическая мощность другого увеличивается и он регулирует отклонение сопла в обоих направлениях. Начиная с операции отделения ускорителя вплоть до его входа в воду, приводы поддерживают сопло в нейтральном положении. Сервоцилиндры ориентированы наружу под углом 45° к осям тангажа и рыскания летательного аппарата. Отметим, что вспомогательный энергоблок, питающий приводы системы управления вектором тяги в рассматриваемом РДТТ, работает на жидком однокомпонентном топливе - гидразине, который подвергается в газогенераторе каталитическому разложению на катализаторе в форме алюминиевых таблеток, покрытых иридием.
10.3.1. ВТОРИЧНАЯ ИНЖЕКЦИЯ
Способ инжекции в сопло РДТТ вспомогательного рабочего вещества для управления вектором тяги был предложен в конце 1940-х гг. и начал применяться в серийных летательных
аппаратах в начале 1960-х гг. К используемым для этих целей веществам относятся такие инертные жидкости, как вода и фреон-113, а также жидкости, взаимодействующие с водородом в продуктах сгорания и двухкомпонентные топлива (например гидразин
Рис. 121 иллюстрирует механизм влияния инжекции на поле течения в сопле. Кроме того, что впрыскиваемая жидкость замещает часть выхлопных газов, инжекция приводит к образованию системы скачков уплотнения (скачок отрыва и индуцированный головной скачок уплотнения). Боковая составляющая реактивной силы возникает как следствие двух эффектов: во-первых, поток импульса вещества, впрыскиваемого через
Рис. 118. (см. скан) Нижняя сборка твердотопливного ускорителя ВКС «Спейс Шаттл» - кабель электропитания (12 шт.); 2 - опорный шпангоут; 3 - система управления вектором тяги (2 шт.); 4 - гаргрот; 5 - передний сопловой блок; 6 - твердотопливный заряд; 7 - стыковочный шпангоут; 8 - блок телеметрической аппаратуры; 9 - бандажные кольца; 10 - двигатели системы отделения ТТУ (4 блока); тепловой экран.

(кликните для просмотра скана)

Рис. 121. Механизм вторичной инжекции. 1 - пограничный слой; 2 - скачок отрыва; 3 - граница отрывного течения; 4 - инжекционное отверстие; 5 - головной скачок уплотнения; 6 - граница зоны инжекции.
отверстие, приводит к появлению боковой реактивной силщ во-вторых, дополнительная боковая сила создается благодаря изменению распределения давления на стенке сопла. Второй эффект увеличивает боковую составляющую по сравнению случаем, когда инжекция жидкости осуществляется не в а прямо в окружающую атмосферу. Например, при вдуве в сопло наблюдалось увеличение боковой силы в 2-3 раза . Эффективность такой системы управления вектором тяги в плоскостях рыскания и тангажа для РДТТ с одним центральным соплом зависит от расположения впускного отверстия и расхода инжектируемого вещества. Величину боковой составляющей при вдуве в сопло газа или впрыске неиспаряющейся жидкости можно рассчитать другим (отличным от описанного в разд. 10.2) способом, аппроксимируя форму граничной поверхности между впрыснутым веществом и основным потоком полуцилиндром с полусферическим основанием.
Со стороны основного потока на эту поверхность действует сила давления, параллельная стенке и пропорциональная где радиус цилиндра, среднее статическое давление в ядре потока. Пренебрегая испарением, смешением и вязкими силами на граничной поверхности, запишем условие баланса между потоком количества движения впрыскиваемой жидкости, параллельным стенке, и силой давления:
где расход (считается равным асимптотическому расходу жидкости, параллельному стенке), асимптотическая
скорость инжектируемого вещества. Если предположить, что достигается в результате изоэнтропического расширения жидкости от давления торможения до давления то это известный параметр, зависящий только от и термодинамических свойств впрыскиваемого вещества. Следовательно,
![]()
Сила, нормальная к стенке, имеет три составляющие: 1) нормальная скорость на срезе впускного отверстия), 2) разность между силами давления на выходе из отверстия при наличии и в отсутствие инжекции и 3) разность между интегралом по внутренней поверхности сопла от давления на стенке при наличии и в отсутствие инжекции. При достаточно малых углах раствора сопла выражение для боковой силы имеет вид
где авых - полуугол раствора выходного раструба сопла, безразмерный коэффициент, зависящий от геометрических характеристик сопла, места расположения впускного отверстия и отношения удельных теплоемкостей вещества в выхлопной струе. Расчет по такой формуле хорошо согласуется с экспериментальными данными .
Если требуется управление вектором тяги в плоскости крена, то можно использовать два сопла или установить в выходном раструбе пару тонких продольных разделительных ребер и впрыскивать жидкость через соответствующие отверстия . Из рис. 122 видно, что отверстия обеспечивают управление по тангажу, отверстия по рысканию, а совместный впрыск или крену. В аэродинамической трубе с водой в качестве впрыскиваемой жидкости проведено параметрическое исследование распределения давления в таком сопле и его изменения в зависимости от отношения расходов вторичного и основного потоков, а также определено оптимальное положение впускных отверстий для вторичной инжекции . Эти результаты были затем использованы при разработке специального устройства, в котором сжигали малоразмерный заряд монотоплива на основе ПХА, а в сопло впрыскивали фреон-113 (рис. 123). Двигатель устанавливали в двух прецизионных подшипниках, позволяющих ему совершать свободное (без трения) движение в плоскости крена. Вращательный момент измеряли с помощью двух балок, приваренных перпендикулярно к переходной муфте, скрепленной с передним днищем РДТТ. Балки жестко заделывались в стенд и при приложении крутящего момента подвергались изгибу. Измерительный мост с тензодатчиками,

Рис. 122. Схематическая диаграмма центрального сопла РДТТ, обеспечиваю щего управление по трем осям .
размещенный на балках, давал сигнал, изменяющийся пропорционально моменту.
Результаты, представленные на рис. 124, показывают, что расположение впускных отверстий инжектируемого вещества слабо влияет на вращательный момент, давая отклонения лишь на 10-15% (это не удивительно, так как положение отверстий выбиралось на основе испытаний с холодным рабочим телом), а снижение удельного импульса, обусловленное

Рис. 123. Схема стендовой установки .
Рис. 124. (см. скан) Экспериментальные данные по зависимости от инжектируемого расхода отношения крутящего момента к тяге (а) и удельного импульса и дополнительной осевой составляющей тяги (б).
установкой в сопле продольных ребер, компенсируется впрыском жидкости, причем с увеличением расхода жидкости удельный импульс возрастает.

Дифференциальное уравнение
Как работает система управления вектором тяги
Дифференциальное уравнение
Как работает система управления вектором тяги
Павел Михайлов, опубликовано 02 мая 2017
Фото: Фирмы-производители
Д ифференциал есть в любом автомобиле, но зачем он нужен? А что такое «активный дифференциал» с функцией torque vectoring — и почему он помогает поворачивать? Давайте выясним!
В движении все колеса автомобиля вращаются с разной скоростью. Хотя бы потому, что дорога неровная, и если одно из колес наезжает на кочку, то оно проходит большее расстояние, чем все остальные, которые едут по ровной дороге. А в повороте все совсем плохо: каждое из четырех колес едет по собственному радиусу (обратите внимание на следы, оставляемые автомобилями на снегу).
И если для неведущих колес это не проблема, то с приводными все не так просто. Когда два ведущих колеса соединены жестким валом, то шины будут постоянно пробуксовывать или проскальзывать, а значит, быстро изнашиваться. При этом возрастет расход топлива, да и управляться автомобиль будет хуже. Чтобы избежать этих проблем, автомобили оснащают дифференциалами.
Изобретателем дифференциала считается французский математик Онесифор Пеккёр, а само событие датируется 1825 годом. Хотя, по некоторым данным, подобное устройство существовало еще в Древнем Риме, но вопрос истории давайте оставим специалистам. В этой статье мы уделим больше внимания относительно молодой системе, известной как torque vectoring, что в переводе с английского значит «управление вектором тяги».
Для начала стоит разобраться, как вообще работает дифференциал. Он состоит из четырех основных элементов: корпуса, сателлитов, оси сателлитов и шестерен полуосей. Принцип его работы несложен: корпус дифференциала жестко соединен с ведомой шестерней главной передачи, ось сателитов жестко соединена с корпусом. Крутящий момент передается на корпус, от него на ось сателлитов и, соответственно, на сами сателлиты — а те, в свою очередь, передают усилие на шестерни полуосей.

Вспомните, как в детстве на качелях уравновешивали друга такой же комплекции — можно было зависнуть в воздухе, не касаясь земли. В дифференциале шестерни полуосей одинаковые, поэтому плечо силы для левой и правой полуоси тоже одинаковое, а значит, и крутящий момент на левом и правом колесе один и тот же.
Дифференциал позволяет колесам крутиться в разные стороны друг относительно друга. Попробуйте на подъемнике покрутить одно приводное колесо — второе будет вращаться в обратную сторону. Однако относительно автомобиля эти колеса крутятся в одну сторону — ведь корпус дифференциала тоже вращается! Это как если бы вы шли в автобусе против хода и при этом все равно удалялись от оставшегося на остановке человека. Итак, получается, что два колеса вращаются с одинаковым усилием и имеют возможность делать это с разными скоростями. Максимально наглядно это показано в видеоролике:
У такой конструкции есть недостаток: на оба колеса приходится одинаковый крутящий момент, а чтобы автомобиль лучше поворачивал, было бы неплохо подать больше крутящего момента на внешнее колесо. Тогда машина при нажатии на газ будет буквально ввинчиваться в поворот — и эффект будет выражен гораздо более ярко, чем на автомобиле с приводом на одну ось и свободным дифференциалом. Но как воплотить такую систему в реальной конструкции?
Сегодня подобные системы становятся все более популярными. Само словосочетание «torque vectoring» впервые прозвучало в 2006 году, однако подобная система, именуемая Active yaw control, появилась еще на раллийных трассах девяностых: ей был оборудован Mitsubishi Lancer Evolution IV, дебютировавший в 1996 году. Но прежде чем подробно разобраться в устройстве полноценного дифференциала с системой torque vectoring, давайте сначала взглянем на ее упрощенный аналог, используемый в автомобиле Ford Focus RS. Аналогичная система использована в трансмиссии Land Rover Discovery Sport и Cadillac XT5 .
Система довольно проста — она даже несколько проще, чем традиционный подключаемый полный привод, ведь в ней нет заднего дифференциала. Есть только две муфты, каждая из которых подключает свою полуось. При движении по прямой без скольжений автомобиль остается переднеприводным, задние колеса подключаются только при пробуксовках и в поворотах (в левом вираже — правое заднее колесо, и наоборот). На колесо может приходиться до 100% крутящего момента, идущего на заднюю ось, тем самым система компенсирует возникающую недостаточную поворачиваемось, как бы докручивая автомобиль.
А как быть, если ведущая ось только одна, и в спокойных режимах обязательно необходим дифференциал, притом открытый, а в повороте хочется подать больше крутящего момента на внешнее колесо, чтобы эффективнее контролировать машину газом, а также уменьшить недостаточную поворачиваемость?
Такие решения также существуют в современном автопроме. Например, автомобили Lexus RC F и GS F последнего поколения оснащены задним дифференциалом, умеющим распределять момент между левым и правым колесом. У такого узла в заднем редукторе главная передача вращает корпус самого обыкновенного дифференциала, там же стоят две повышающие планетарные передачи, которые с помощью пакета фрикционов могут соединить корпус дифференциала с полуосью. Таким образом, к наружному колесу подводится дополнительный крутящий момент через планетарную передачу, за счет чего и возникает эффект ввинчивания в поворот.
Аналогичное решение применено и на задней оси полноприводных BMW X6 M и X5 M — как для BMW, так и для Lexus, и для Cadillac с Land Rover систему разработала и производит фирма GKN. Различие по большому счету только в корпусе главной передачи: например, у BMW он алюминиевый, а у Lexus — чугунный. Привод фрикционных муфт обоих производителей механический, осуществляется он одинаковыми муфтами GKN.
В автомобилях Audi с опциональным спортивным дифференциалом тоже есть подобная система, но здесь не планетарные, а простые зубчатые передачи с внутренним зацеплением. Но принцип работы абсолютно такой же: с помощью пакета фрикционов соединяются две шестерни, и полуось подключается к корпусу дифференциала через повышающую передачу. Для более полного понимания можно посмотреть этот ролик:
Насколько же велик эффект от использования продвинутых дифференциалов? Американский журнал Car and Driver провел сравнительный тест двух Lexus RC F, один из которых был оснащен системой torque vectoring differential, а второй — обычным «самоблоком». Как результат, более значительные максимальные ускорения, меньший угол поворота руля и лучшее время на круге у автомобиля с активным дифференциалом, характер автомобиля изменился в сторону избыточной поворачиваемости. И радует, что доступна она не только для спортивных автомобилей, но и для для компактного кроссевера Nissan Juke — пусть и в несколько упрощенном варианте.
Пока не стоит ожидать, что такие системы вытеснят традиционные дифференциалы — ведь они сложнее, дороже и больше нужны активным водителям. Однако с наступлением эры электромобилей появятся широчайшие возможности для управления вектором тяги: ведь если на каждое ведущее колесо приходится свой электромотор, то реализация эффекта torque vectoring станет лишь вопросом программного обеспечения.
— Полный привод? О нет, это решение не для нас. Активный дифференциал TVD для управления вектором тяги — вот все, что нам нужно.
А ведь Юкихико Ягучи, создатель всех Лексусов с литерой «F», прав. Потому что его новое детище, тяжелый и мощный (477 л.с.!) седан Lexus GS F, восхитителен не только на испанских прямиках. Но и на «затычном» испанском гоночном треке Харама!
П очему Lexus с японским упорством культивирует спортбренд «F» по аналогии с мерседесовским AMG или «М» от BMW? Первый F-Lexus, седан IS F образца 2007 года, лавров не -снискал: за семь лет продано всего 12 тысяч седанов — это меньше 16 тысяч первенцев BMW M3 серии Е30 в восьмидесятых, не говоря уж о тираже в 66 тысяч «эмок» серии Е92 в двухтысячных.
«Кассу» Лексусу на главном рынке, в Америке, давно делают не седаны, а кроссоверы RX. Имидж создают гибриды. Тогда зачем литера «F» и красивая легенда, что она — от названия трассы Fuji Speedway, где нынче доводят все «заряженные» Лексусы?
Пассажирам спортивный антураж создают алькантара и вставки под углепластик (который может быть как глянцевым, так и фактурным), а водителю - пухлый руль, металлические накладки на педали и F-приборы в стиле суперкара Lexus LFA
Потому что хочется. Японцы давно стремятся ни в чем не уступать немецким грандам. И я не исключаю, что года три-четыре назад F-совещание в штаб-квартире Лексуса могло завершиться следующим резюме: раз уж дело не пошло с седаном поменьше, то с купе и четырех-дверкой побольше должно получиться.
После рестайлинга этим летом GS озверел и ощерился двойными RC-бумерангами фар, поэтому от двухдверки RC F «заряженный» седан отличается разве что отсутствием отдушины на алюминиевом капоте. Те же мощные жвалы бампера, где прячутся масляные радиаторы двигателя, те же жабры на передних крыльях.

Большие отдушины по краям переднего бампера - для масляных радиаторов. А небольшие отверстия в нижних углах зева фальшрадиаторной решетки - воздуховоды для охлаждения тормозов

Маленький углепластиковый спойлер пусть немного, но снижает подъемную силу, уменьшая завихрения за кормой

Сзади GS F проще всего отличить по псевдодиффузору и сдвоенным выхлопным патрубкам, выстроенным по трапеции
0 / 0
В уютный ковш с зарешеченными декоративными отверстиями (якобы под четырехточечные ремни безопасности) садишься с достоинством. Не надо падать, не надо втискиваться. Гоночного антуража напускают приборы со здоровенным тахометром от купе RC F и наполовину затянутая в алькантару передняя панель с выставленными напоказ головками крепежных болтов. Сзади по-прежнему просторно, а багажник ужался всего на 10 литров — лишившись, правда, глубокой ниши для полноразмерной запаски.

В зависимости от выбранного режима работы двигателя и трансмиссии меняется информационное поле. Eco дает представление разве что о скорости (крошечный стрелочный спидометр столь же неудобен, как у Porsche 911). Оптимальный баланс между количеством информации и быстротой ее восприятия достигается в режимах Normal и Sport. А Sport+ уже перебор: дублирование градусников температуры масла и охлаждающей жидкости ни к чему. Номер текущей передачи, кстати, не выводится ни в одном из режимов, если не толкнуть селектор из Драйва в «ручку»
С технической точки зрения Lexus GS F одновременно является и спортмодификацией исходного седана, и удлиненной четырехдверной версией купе RC F. Кузов усилен растяжками под днищем. А вся начинка — от «заряженной» двухдверки: у них общий не только передний модуль с алюминиевым подрамником передней двухрычажки, но и задняя пятирычажная подвеска, где один верхний рычаг и опоры ступичных подшипников выполнены из «крылатого» металла.
Под капотом — знакомое по RC F олдскульное сочетание атмосферного мотора V8 мощностью 477 л.с. и восьмиступенчатого «автомата» с гидротрансформатором. Но разве последний не ограничивает предельные обороты двигателя? Ведь именно поэтому Mercedes-AMG использует мокрое сцепление в своем «автомате» Speedshift MCT, а BMW так и вовсе меняет «гражданскую» гидромеханику на М-преселектив. И разве не проще достичь требуемой мощности с турбонаддувом, без которого уже немыслимы не только Audi RS 6 Avant, но и BMW M с Мерседесами-AMG? Ведь Lexus GS F, даже будучи на 60—80 кг легче, уступает им по 90—93 л.с. — и отстает в спурте до «сотни» на 0,3—0,9 с, показывая худшие в классе 4,6 с.

В отличие от мультиконтурных кресел Audi, BMW и Мерседеса, роскошный вентилируемый ковш Лексуса не имеет регулировки ширины боковой поддержки и высоты поясничного подпора

GS F просторен, но аскетичен, как обычный GS с пакетом F Sport: ни трехзонного климат-контроля, ни электрорегулировок заднего дивана. Из элементов роскоши оставлена только шторка заднего стекла с электроприводом

На кованых 19-дюймовых колесах BBS - шины Michelin Pilot Super Sport, как у BMW M5. «Моноблоки» Brembo - шестипоршневые спереди и четырехпоршневые сзади
0 / 0
На подобные упреки Ягучи-сан отвечает, что секунды и «лошади» — это ничто. Главное, мол, в уточненной для седана F-философии: Response, Sound & Limitless power feel — «отклик, звук и бесконечное ощущение мощности». Заметьте, ощущение мощности, а не мощь как таковая! Отклик безупречен — GS F по-кошачьи мягко и шустро следует за правой педалью. А бархатистый баритон V8, переходящий на высоких оборотах в меццо-сопрано, формирует обещанную бесконечность ощущения мощности. Нужно лишь отключить фальшивые подпевки синтезатора Active Sound Control, имитирующего в переднем динамике шум впуска и другие подкапотные звуки, а в заднем — бас системы выхлопа.
Адаптивный «автомат» не упрекнешь в медлительности на горной дороге — и даже на треке. Помимо режимов Sport и еще более агрессивного Sport+, в него «зашито» знакомое по BMW и Audi распознавание местности по навигатору: на дуге Lexus не станет переключаться «вверх», не достигнув предельных оборотов. А мощное замедление заставит «автомат» активно подтыкать пониженные передачи.
И все бы хорошо. Но когда вам нужно просто ускориться для обгона грузовика — полуторасекундная задержка! Потому как новомодные алгоритмы на прямой без резких замедлений не работают.

Настройки активного дифференциала надо выбирать отдельной кнопкой TVD, а режимы работы силового агрегата, электроусилителя и системы стабилизации - «шайбой». Причем Sport взбодрит только «автомат»: коль хотите оторваться, сразу кликайте в Sport+

Японцы уверяют, что система инфоразвлечений была модернизирована во время рестайлинга. Хотя графика осталась страшненькой, звуковое сопровождение кликов - смешным, а управляться со всем этим надо той же неудобной «мышью» Remote Touch, а не тачпадом, как в купе RC
0 / 0
Благо 477 л.с. решают любые вопросы. А сомневающимся в помощь — заимствованные у купе RC F «мертвые» тормоза Brembo. Правда, на треке стоит помнить, что седан все же на 100 кг тяжелее двухдверки и три агрессивных круга — это максимум. Хотя, скорее всего, раньше тормозов перегреется «автомат».
Шасси седана идентично купейному. Руль с электроусилителем — тоже без механизма VGRS, варьирующего передаточное отношение. Никакой полноуправляемости, столь популярной даже у специалистов из Porsche и доступной в качестве опции на обычном купе RC. Более того, даже амортизаторы ZF Sachs — «пассивные»! Все оттого, что Ягучи-сан — сторонник «старой школы» и предпочитает широте возможностей точность правильной настройки.

Шасси у GS F фактически то же, что у купе RC F (на фото): подрамник передней двухрычажки из «крылатого» металла вместо стали у обычного седана. Алюминий также шире внедрен и в заднюю пятирычажку: из него сделаны опоры ступичных подшипников и один из верхних рычагов. F-амортизаторы ZF Sachs - «пассивные», без магнитореологической жидкости, как на «гражданском» седане GS 350 AWD

Кузов GS F усилен аж четырьмя растяжками на днище. Однако на алюминиевых «раскосах» между «стаканами» передних стоек, что стоят на купе, японцы решили сэкономить
0 / 0
Благодаря тому, что база GS F на 120 мм больше, чем у двухдверки, и задние шины у него на 20 мм шире, он стабильнее и однозначнее на пологих скоростных дугах. Я бы только усилие на руле сделал посочнее: оно не столь естественно и насыщенно. Ну и дорожная мелочь, добросовестно ретранслируемая низкопрофильными шинами, раздражает. Но в целом подвеска если и жестче, чем у обычного «джи-эса» с пакетом F Sport, то ненамного: среднекалиберные колдобины пружины и амортизаторы глотают уверенно.
И в общем баланс между спортивностью и комфортом у седана выдержан точнее. Даже в медленных «шпильках» Харамы тяжелый GS F если и намекал на снос, то через долю секунды сменял его равномерным скольжением четырех колес. Магия, волшебство?
— Мы убедились, что дифференциал TVD позволяет водителю надежнее контролировать траекторию, чем обычный «самоблок», — объясняет это чудо господин Ягучи.

Атмосферная «восьмерка» 2UR-GSE с комбинированным впрыском была позаимствована для F-моделей у флагмана LS 600h еще в 2007 году. Восемь лет назад ей придали F-характер за счет нового впускного коллектора, титановых клапанов, полых распредвалов и иной формы камеры сгорания. А с прошлого года новый «софт», облегченные кованые шатуны и более «свободная» система выпуска позволили нарастить мощность и обороты: 477 л.с. при 7100 об/мин вместо прежних 423 л.с. при 6600 об/мин. Кроме того, электромеханические фазовращатели вместо гидравлических теперь помогают моделировать цикл Аткинсона при частичных нагрузках: впускные клапаны закрываются на 30° позже, чем под полным дросселем, что позволило снизить расход топлива

Пакеты многодисковых муфт и планетарные редукторы по бокам от главной передачи, способные индивидуально менять подводимый крутящий момент и угловую скорость каждого из задних колес, - активный задний дифференциал TVD идентичен тому, что используется на купе RC F. Узел производит фирма GKN - с 2008 года его устанавливают на BMW X6. По аналогии с купе для седана GS F сделано три предустановки: Standard, Slalom и Track. В Слаломе седан активнее доворачивается как под тягой в середине дуги, так и под сброс газа на входе в поворот. А Track позволяет мощнее разгоняться в вираже за счет лучшей стабильности
0 / 0
TVD, Torque Vectoring Differential, — это активный дифференциал с управляемым вектором тяги. Не японский, что характерно: идея, рожденная на Островах и воплощенная фирмами Mitsubishi и Honda 20 лет тому назад, ныне востребована в Германии — Lexus использует тот же узел фирмы GKN, что и BMW. Но если баварцы ставят его на полноприводники Х6, то японцы — только на заднеприводные «заряженные» машины. Причем GS F имеет TVD уже «в базе».
Точных цен пока нет. В США, где продажи начнутся в декабре, GS F может оказаться дороже купе RC F всего на одну—две тысячи долларов. Это значит, что в России, где двухдверка оценивается в 4,9 млн рублей, седан мог бы стоить около пяти миллионов. Спрос, пусть и небольшой, но будет: BMW M5 у нас дороже на полмиллиона, а Mercedes-Benz Е 63 AMG — на миллион с лишним. К слову, из 53 купе RC, проданных с марта по сентябрь, четверть пришлось на RC F.

Для системы Active Sound Control (ASC) смонтированы отдельные динамики. Передний широкополосный призван имитировать шумы из моторного отсека, а задний низкочастотный «сабвуфер» - звук выхлопа

Новое японское слово в управлении «автоматом»: G-AI Control. G - это ускорение, а вот AI (Artificial Intelligence) - искусственный интелект. Суть проста: коробка активно понижает передачи при интенсивном замедлении и не переключается «вверх» в поворотах
0 / 0
Но загвоздка в том, что GS F — малотиражный эксклюзив. А в свете обязательности внедрения системы ЭРА-ГЛОНАСС (АР №19, 2015) даже Lexus, которому кризис нипочем благодаря оглушительному успеху кроссовера NX, сейчас сомневается в экономической целесообразности сертификации и вывода на российский рынок нишевых моделей. Так что разворот вектора F-тяги и судьбу модели GS F у нас скорее будут определять маневры с системой ЭРА-ГЛОНАСС, нежели выкладки маркетологов.
И не только Лексуса! Российское будущее его прямого конкурента, 640-сильного седана Cadillac CTS-V, также под вопросом. Каков «горячий» Caddy и настолько ли он лучше Лексуса, насколько мощнее? Это я выясню уже через две недели в Германии.

| Паспортные данные | ||
|---|---|---|
| Автомобиль | Lexus GS F | |
| Кузов | 4-дверный седан | |
| Число мест | 5 | |
| Размеры, мм | длина | 4915 |
| ширина | 1845 | |
| высота | 1440 | |
| колесная база | 2850 | |
| колея спереди/сзади | 1555/1560 | |
| Объем багажника, л | 520 | |
| Снаряженная масса, кг | 1790 | |
| Полная масса, кг | 2320 | |
| Дорожный просвет, мм | 130 | |
| Двигатель | бензиновый, с непосредственным впрыском | |
| Расположение | спереди, продольно | |
| Число и расположение цилиндров | 8, V-образно | |
| Рабочий объем, см 3 | 4969 | |
| Степень сжатия | 12,3:1 | |
| Число клапанов | 32 | |
| Макс. мощность, л.с./кВт/об/мин | 477/351/7100 | |
| Макс. крутящий момент, Нм/об/мин | 530/4800—5600 | |
| Коробка передач | автоматическая, 8-ступенчатая | |
| Привод | на задние колеса | |
| Передняя подвеска | независимая, пружинная, на двойных поперечных рычагах | |
| Задняя подвеска | независимая, пружинная, многорычажная | |
| Передние тормоза | дисковые, вентилируемые | |
| Задние тормоза | дисковые, вентилируемые | |
| Передние шины | 255/35 R19 | |
| Задние шины | 275/35 R19 | |
| Максимальная скорость, км/ч | 270 | |
| Время разгона 0—100 км/ч, с | 4,6 | |
| Расход топлива, л/100 км | городской цикл | 16,6 |
| загородный цикл | 8,1 | |
| смешанный цикл | 11,2 | |
| Выбросы CO 2 , г/км | 260 | |
| Емкость топливного бака, л | 66 | |
| Топливо | АИ-98 | |
Или его части.
Энциклопедичный YouTube
-
1 / 5
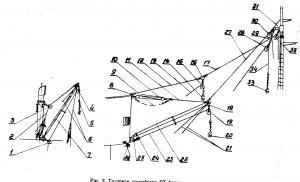
Первые опыты, связанные с практической реализацией изменяемого вектора тяги на самолётах, относятся к 1957 году и проводились в Великобритании в рамках программы по созданию боевого самолета с вертикальным взлетом и посадкой . Прототип под обозначением Р.1127 был оснащен двумя поворачивающимися на 90° соплами, расположенными по бокам самолёта на линии центра тяжести, которые обеспечивали движение в вертикальном, переходном и горизонтальном режимах полета. Первый полёт Р.1127 состоялся в 1960 году , а в 1967 году на его базе был создан первый серийный СВВП «Харриер» .
Существенным шагом вперед в разработке двигателей с изменяемым вектором тяги в рамках программ СВВП стало создание в 1987 советского сверхзвукового СВВП Як-41 . Принципиальной отличительной чертой данного самолёта стало наличие трёх двигателей: двух подъёмных и одного подъёмно-маршевого с поворотным соплом, расположенным между хвостовыми балками. Трехсекционная конструкция сопла подъёмно-маршевого двигателя делала возможным поворот вниз от горизонтального положения на 95°. \
Расширение маневренных характеристик
Ещё в ходе работ над Р.1127 испытателями было замечено, что использование отклоняемого вектора тяги в полёте несколько облегчает маневрирование самолёта. Однако из-за недостаточного уровня развития технологии и приоритетности программ СВВП серьёзные работы в области повышения маневренности за счёт ОВТ не велись до конца 1980-х годов.
В 1988 году на базе истребителя F-15 B был создан экспериментальный самолёт с двигателями с плоскими соплами и отклонением вектора тяги в вертикальной плоскости. Результаты испытательных полётов показали высокую эффективность ОВТ для повышения управляемости самолёта на средних и больших углах атаки .
Приблизительно в то же время в Советском Союзе был разработан двигатель с осесимметрическим отклонением сопла кругового сечения, работы над которым велись параллельно с работами над плоским соплом с отклонением в вертикальной плоскости. Поскольку установка плоского сопла на реактивный двигатель сопряжена с потерей 10-15 % тяги, предпочтение было отдано круглому соплу с осесимметрическим отклонением, и в 1989 году состоялся первый полёт истребителя Су-27 с экспериментальным двигателем.
Принцип действия
Для схемы с отклонением потока в дозвуковой части характерно совпадение угла механического отклонения с газодинамическим. Для схемы с отклонением только в сверхзвуковой части газодинамический угол отличается от механического.
Конструкция схемы сопла, представленная на рис. 1а , должна иметь дополнительный узел, обеспечивающий отклонение сопла целиком. Схема сопла с отклонением потока только в сверхзвуковой части на рис. 1б фактически не имеет никаких специальных элементов для обеспечения отклонения вектора тяги. Различия в работе этих двух схем выражаются в том, что для обеспечения одного и того же эффективного угла отклонения вектора тяги схема с отклонением в сверхзвуковой части требует больших управляющих моментов.
Представленные схемы также требуют решения проблем обеспечения приемлемых массо-габаритных характеристик, надежности , ресурса и быстродействия.
Имеются две схемы управления вектором тяги:
- с управлением в одной плоскости;
- с управлением во всех плоскостях (с всеракурсным отклонением).
Газодинамическое управление вектором тяги (ГУВТ)
Высокой эффективности управления вектором тяги можно добиться с помощью газодинамического управления вектором тяги (ГУВТ ) за счет асимметричной подачи управляющего воздуха в тракт сопла.
Газодинамическое сопло использует «струйную» технику для изменения эффективной площади сопла и отклонения вектора тяги , при этом механически сопло не регулируется. В этом сопле отсутствуют горячие высоконагруженные подвижные детали , оно хорошо компонуется с конструкцией ЛА , что уменьшает массу последнего.
Внешние контуры неподвижного сопла могут плавно вписываться в обводы самолета, улучшая характеристики конструктивной малой заметности . В этом сопле воздух от компрессора может направляться в инжекторы в критическом сечении и в расширяющейся части для изменения соответственно критического сечения и управления вектором тяги.
Образование управляющих сил обеспечивается следующим порядком операций.
- На первой фазе работы сопла (рис. 5) увеличивают угол отклонения створок расширяющейся части сопла - угол α установки выходных створок расширяющейся части 3 сопла.
- На второй фазе (рис. 6) , на режиме образования управляющих усилий на части поверхности сопла открывают заслонки 8 для поступления атмосферного воздуха на части боковой поверхности расширяющейся части сопла 3 . На рис.6 показан вид А и направления втекания атмосферного воздуха через открытые отверстия с заслонками на части боковой поверхности. Переключение заслонок 8 на противоположной половине боковой расширяющейся части сопла приводит к отклонению струи и вектора тяги двигателя на угол β в противоположном направлении.

Для создания управляющих усилий в двигателе со сверхзвуковым соплом можно несколько изменить сверхзвуковую часть уже существующего сопла. Эта относительно несложная модернизация требует минимального изменения основных деталей и узлов исходного, штатного сопла.
При проектировании большая часть (до 70 %) узлов и деталей модуля сопла могут не изменяться: фланец крепления к корпусу двигателя, основной корпус, основные гидроприводы с узлами крепления, рычагами и кронштейнами , а также створки критического сечения. Изменяются конструкции надстворок и проставок расширяющейся части сопла, длина которых увеличивается, и в которых были выполнены отверстия с поворотными заслонками и гидроприводами . Кроме этого изменяется конструкция внешних створок, а пневмоцилиндры для них заменяются гидроцилиндрами , с рабочим давлением до 10 МПа (100 кг/см 2).
Отклоняемый вектор тяги
Отклоняемый вектор тяги (ОВТ ) - функция сопла , изменяющая направление истечения реактивной струи. Предназначена для улучшения тактико-технических характеристик самолёта. Регулируемое реактивное сопло с отклоняемым вектором тяги - устройство с изменяемыми, в зависимости от режимов работы двигателя, размерами критического и выходного сечений, в канале которого происходит ускорение потока газа с целью создания реактивной тяги и возможностью отклонения вектора тяги во всех направлениях.
Применение на современных самолётах
В настоящее время система отклонения вектора тяги рассматривается как один из обязательных элементов современного боевого самолета в связи со значительным улучшением летных и боевых качеств, обусловленным её применением. Также активно изучаются вопросы модернизации имеющегося парка боевых самолетов, не имеющих ОВТ, путём замены двигателей или установки блоков ОВТ на штатные двигатели. Второй вариант был разработан одним из ведущих российских производителей ТРД - компанией «Климов», которая также выпускает единственное в мире серийное сопло с всеракурсным отклонением вектора тяги для установки на двигатели РД-33 (семейство истребителей МиГ-29) и АЛ-31Ф (истребители марки Су).
Боевые самолеты с управляемым вектором тяги:
C осесимметрическим отклонением вектора тяги
- Су-27СМ2 (двигатель АЛ-31Ф-М1 , Изделие 117С)
- Су-30 (двигатель АЛ-31ФП)
- ПАК ФА (прототип)
- F-15 S (экспериментальный)
Управляемый вектор тяги
Управление вектором тяги (УВТ) реактивного двигателя - отклонение реактивной струи двигателя от направления, соответствующего крейсерскому режиму.
В настоящее время управление вектором тяги обеспечивается, в основном, за счет поворота всего сопла или его части.
Рис.1:Схемы сопел с механическим УВТ: а) - с отклонением потока в дозвуковой части; б) - с отклонением потока в сверхзвуковой части; в) - комбинированное .
Для схемы с отклонением потока в дозвуковой части характерно совпадение угла механического отклонения с газодинамическим. Для схемы с отклонением только в сверхзвуковой части газодинамический угол отличается от механического.

Рис.2: Схема сопла с ГУВТ с использованием атмосферного воздуха на режиме осевого истечения: 1-силовой поток; 2-эжектируемый управляющий поток атмосферы; 3-кольцевая обечайка закрепленная на разделительных ребрах; 4-разделительные ребра.

Рис.3:Схема сопла с ГУВТ на режиме максимального отклонения вектора тяги: 1-закрытый сектор; 2-открытый сектор; 3-область пониженного давления.
Газодинамическое сопло использует "струйную" технику для изменения эффективной площади сопла и отклонения вектора тяги, при этом механически сопло не регулируется. В этом сопле отсутствуют горячие высоконагруженные подвижные детали , оно хорошо компонуется с конструкцией ЛА, что уменьшает массу последнего.
Внешние контуры неподвижного сопла могут плавно вписываться в обводы самолета, улучшая характеристики малой заметности. В этом сопле воздух от компрессора может направляться в инжекторы в критическом сечении и в расширяющейся части для изменения соответственно критического сечения и управления вектором тяги.
Ссылки
- РД-133 - на airwar.ru
Литература
- Безвербый В.К., Зернов В.Н., Перелыгин Б.П. Выбор проектных параметров летательных аппаратов.. - М.: МАИ., 1984.
- №36 // Экспресс-информация. Серия: авиационное двигателестроение.. - М.: ЦИАМ., 2000 г.
- Краснов Н.Ф. Аэродинамика. 2 // Аэродинамика. Методы аэродинамического расчета.. - М.: ВШ, 1980.
- Швец А.И. Аэродинамика несущих форм.. - Киев.: ВШ, 1985г..
- Залманзон Л.А. Теория элементов пневмоники. - М.: Наука, 1969г.. - С. 508.
- 2 // Опыт создания газодинамического устройства управления вектором тяги.Тезисы докладов.. - Самара: «Международная научно-технической конференция, посвященная памяти Генерального конструктора аэрокосмической техники академика Н.Д. Кузнецова», 2001 г.. - С. 205-206.